JAXA · Aerospace · 2008
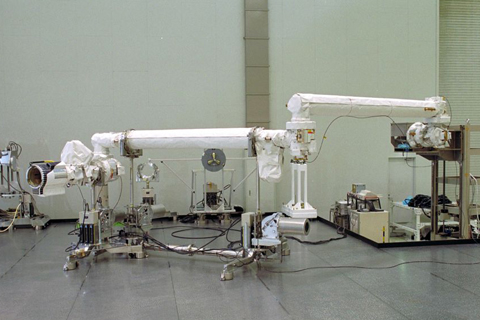
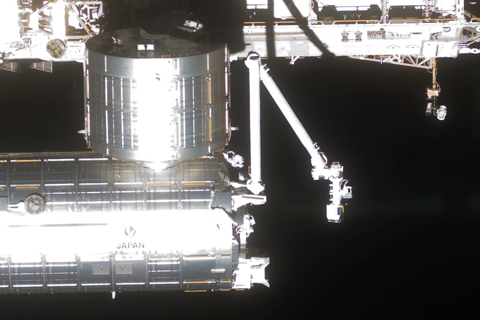
Japanese Experiment Module Remote Manipulator System. Two-part robotic arm (Main Arm 10 m + Small Fine Arm 2.2 m) attached to the Kibo module of the ISS. Handles external payloads on the Kibo Exposed Facility. The Main Arm can position payloads with 50 mm accuracy; the Small Fine Arm achieves 10 mm precision for delicate experiments.
Price on application
View full interactive profile, comparisons & videos →| Category | Aerospace |
| Sub-type | Space Station Arm |
| Status | Active |
| Year | 2008 |
| Origin | Japan |
| Also known as | Japanese Experiment Module Remote Manipulator System, Kibo Arm |
| Announced | 1995 |
| Released | 2008-06-03 |
| Weight | 780 kg |
| Frame | CFRP composite |
| Degrees of freedom | 6 |
| Payload | 7000 kg |
| Reach | 10000 mm |
| Repeatability | ±10 mm |
| Actuator type | Brushless DC motors |
| Made in | Japan (Mitsubishi Heavy Industries) |