



CSA · Aerospace · 2008
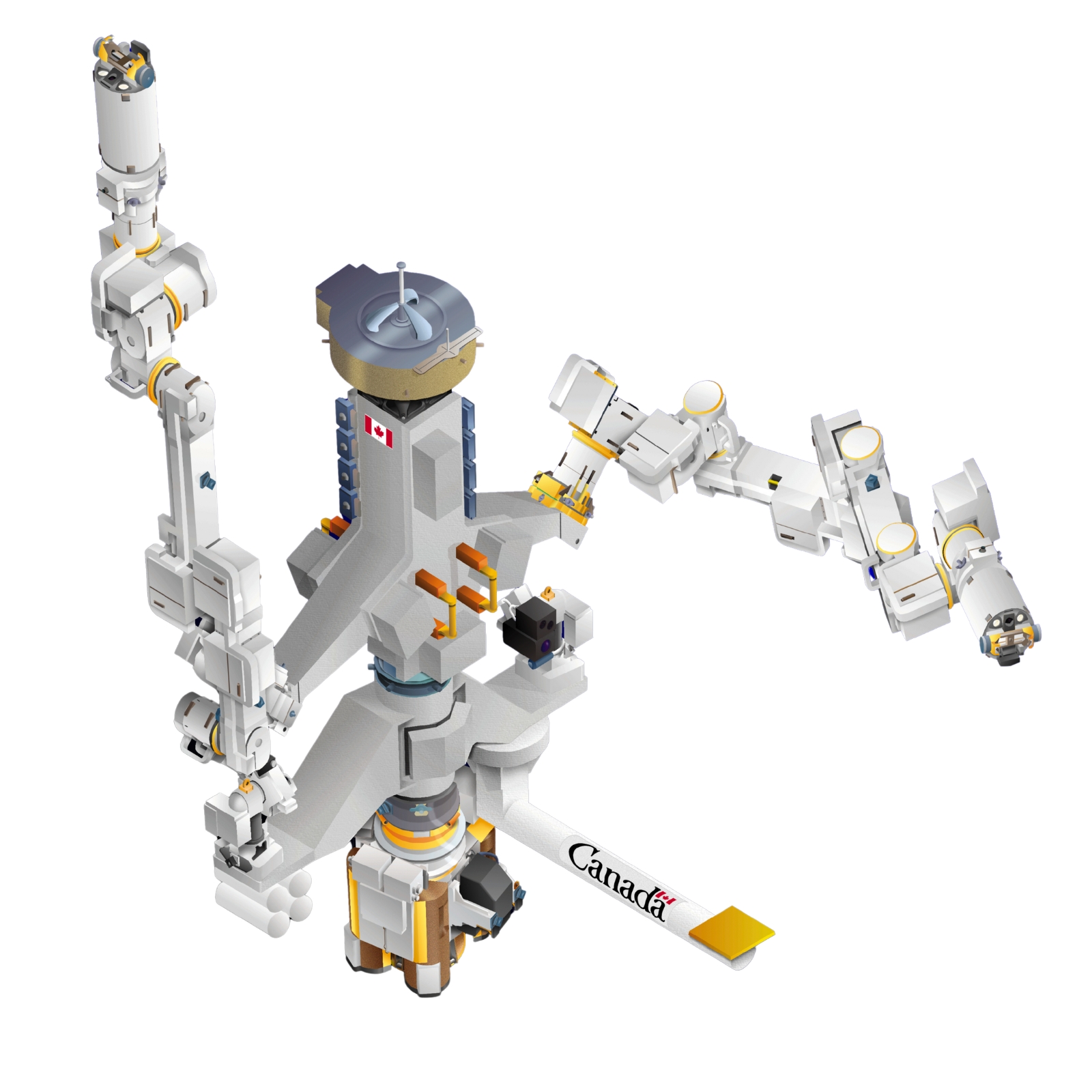
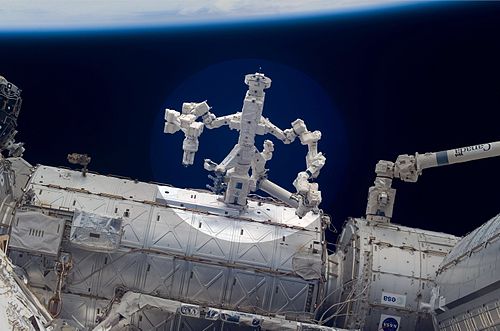
Special Purpose Dexterous Manipulator (SPDM). Two-armed dexterous robot installed on the ISS in 2008, designed to perform precise maintenance tasks that previously required spacewalks. Each arm has 7 DOF. Attaches to the end of Canadarm2 or directly to the station structure. Has performed satellite refueling demonstrations (RRM) and pump module replacements.
Price on application
View full interactive profile, comparisons & videos →| Category | Aerospace |
| Sub-type | Space Station Arm |
| Status | Active |
| Year | 2008 |
| Origin | Canada |
| Also known as | SPDM, Special Purpose Dexterous Manipulator, Canada Hand |
| Announced | 1994 |
| Released | 2008-03-11 |
| Dimensions (H×W×D) | 3500 × 2400 mm |
| Weight | 1560 kg |
| Frame | Graphite/epoxy composite, titanium |
| Degrees of freedom | 15 |
| Payload | 600 kg |
| Reach | 3500 mm |
| Actuator type | Brushless DC motors |
| Made in | Canada (MDA) |