


MIT · Quadruped · 2018
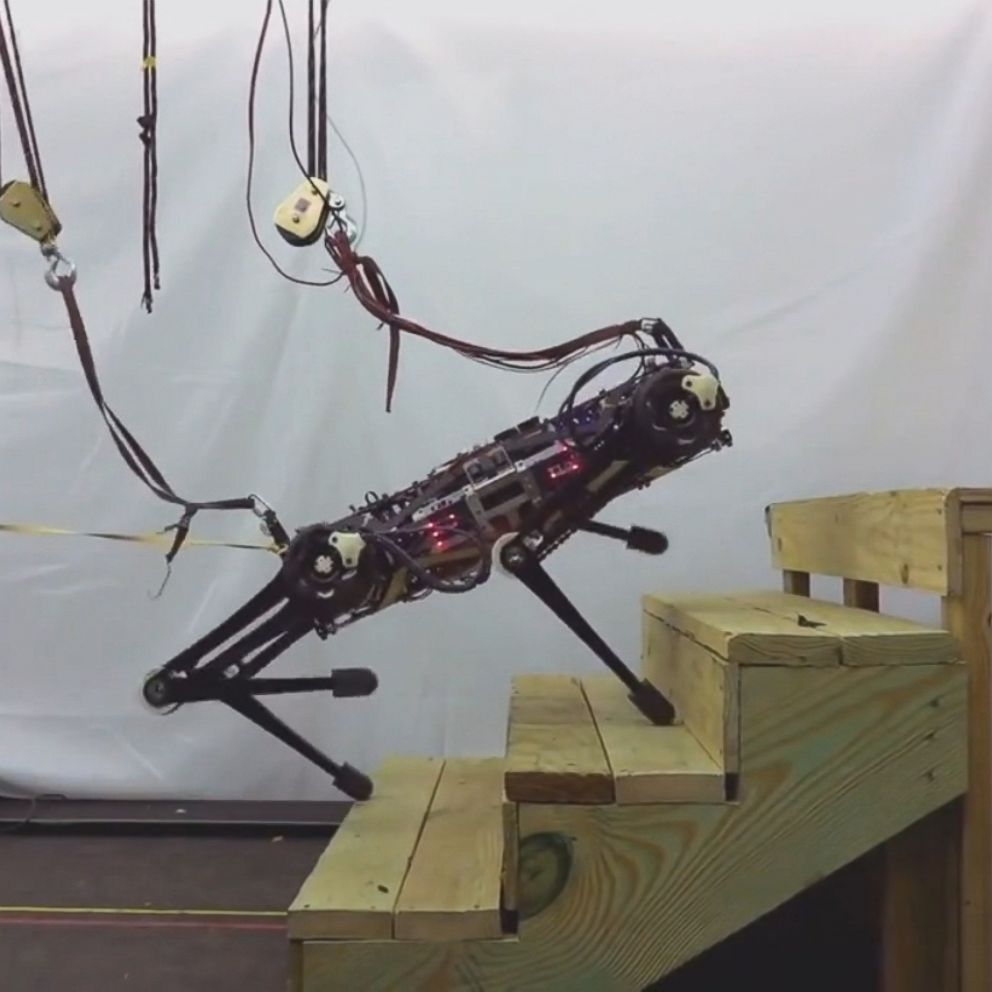
MIT Biomimetic Robotics Lab's blind dynamic quadruped (Sangbae Kim). Using high-torque backdriveable electric motors and pure proprioception — no cameras — Cheetah 3 climbs stairs, recovers from shoves and runs ~3 m/s. Successor to the 6 m/s tethered MIT Cheetah; its actuator design seeded Mini Cheetah and much of modern legged robotics.
Price on application
View full interactive profile, comparisons & videos →| Category | Quadruped |
| Sub-type | Dynamic Research Quadruped (blind locomotion) |
| Status | Active |
| Year | 2018 |
| Origin | USA (MIT) |
| Released | 2018 |
| Weight | 41 kg |
| Degrees of freedom | 12 |
| Max speed | 3 m/s |
| Actuator type | High-bandwidth proprioceptive actuators (impact mitigation, force control); new leg design adds abduction/adduction (hip roll) proprioceptive actuation + expanded hip/knee range of motion |
| Use cases | Dynamic-locomotion research, Blind stair climbing, Disaster response research |
| Warranty | 12 months |
| Made in | USA |
